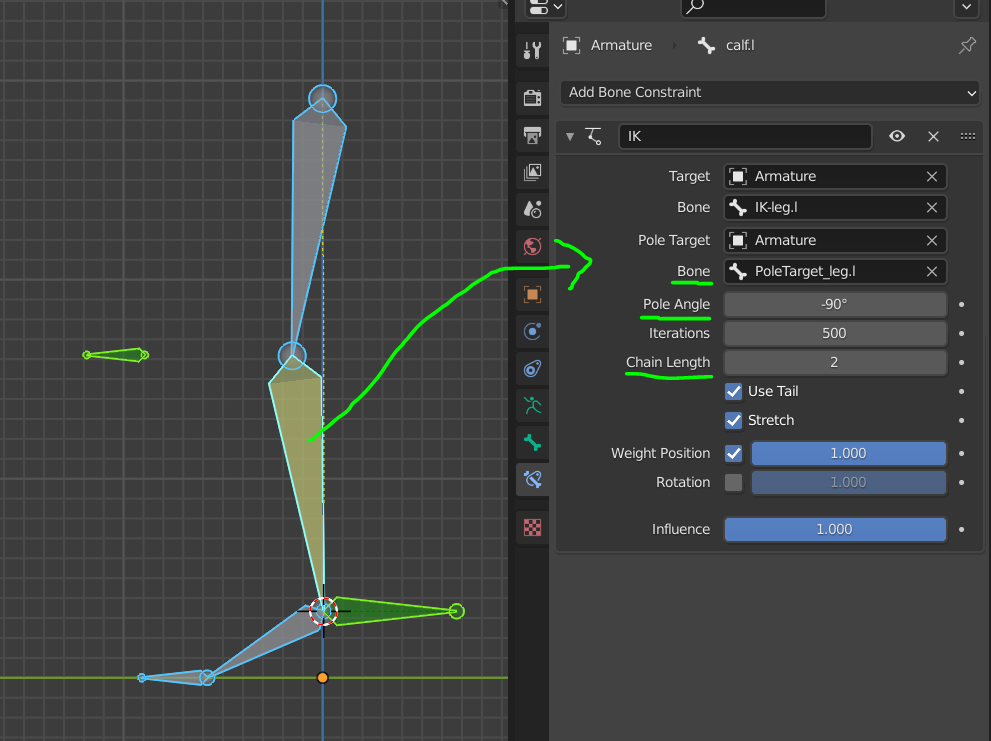
As usual, I’m trying to run before I can walk (literally). I thought I’d have a go at a relatively simplistic humanoid rig. I’ve done the basic bones in the right sort of proportions and I’m trying to get the leg motion correct. I’ve got an IK constraint (chain length 2) on the shin bone to the green control bone at the heel and I’ve set rotation limits in the shin & thigh bone IK settings. It looks reasonably OK until I try to ‘step forwards’ whereupon the leg snaps back to the start position as soon as the tail of the shin passes the Z axis.
I know there are plenty of tutorials out there but I like to try to work things out myself. Unfortunately I’ve got a bit stuck so any help would be greatly appreciated.