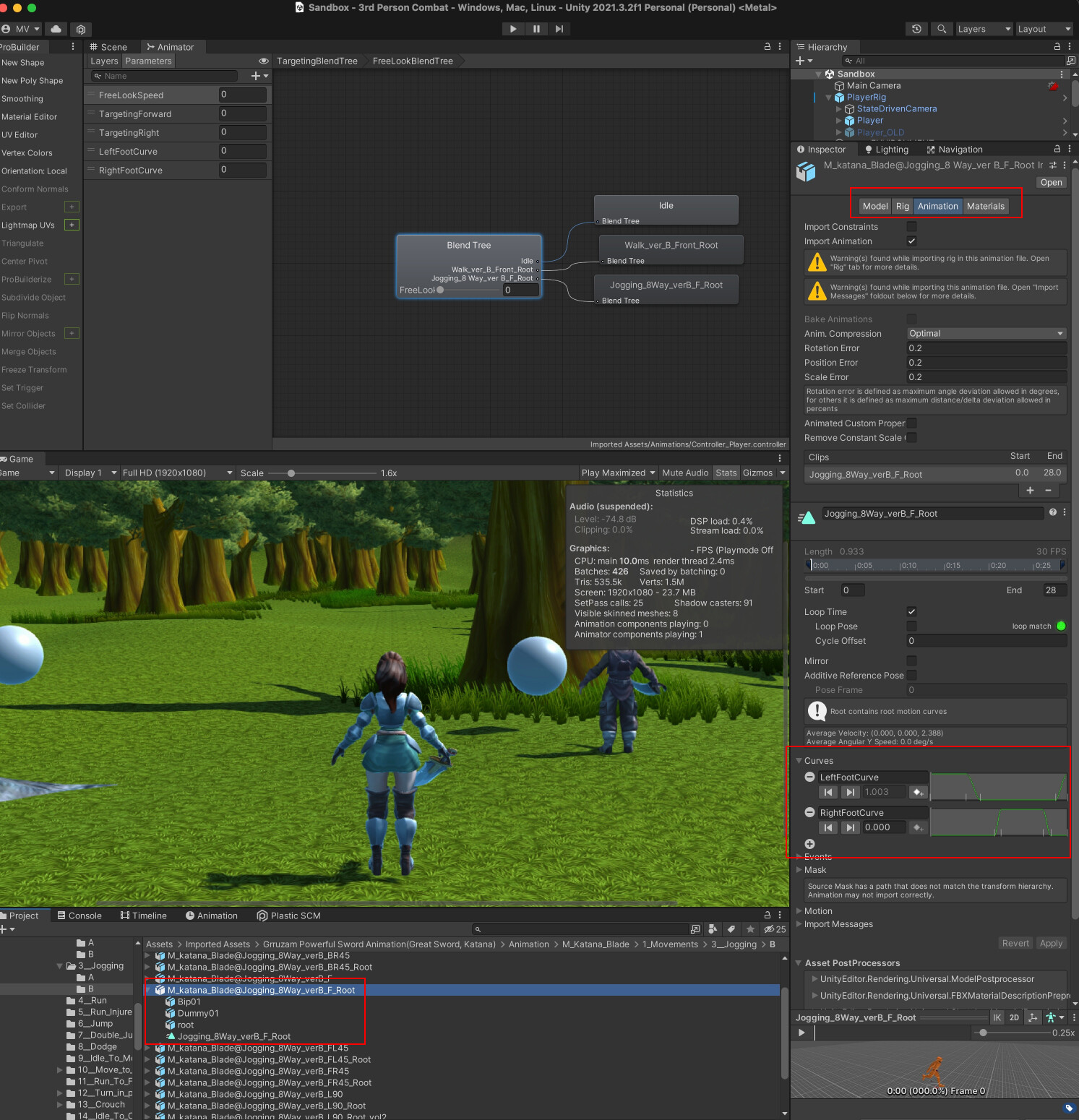
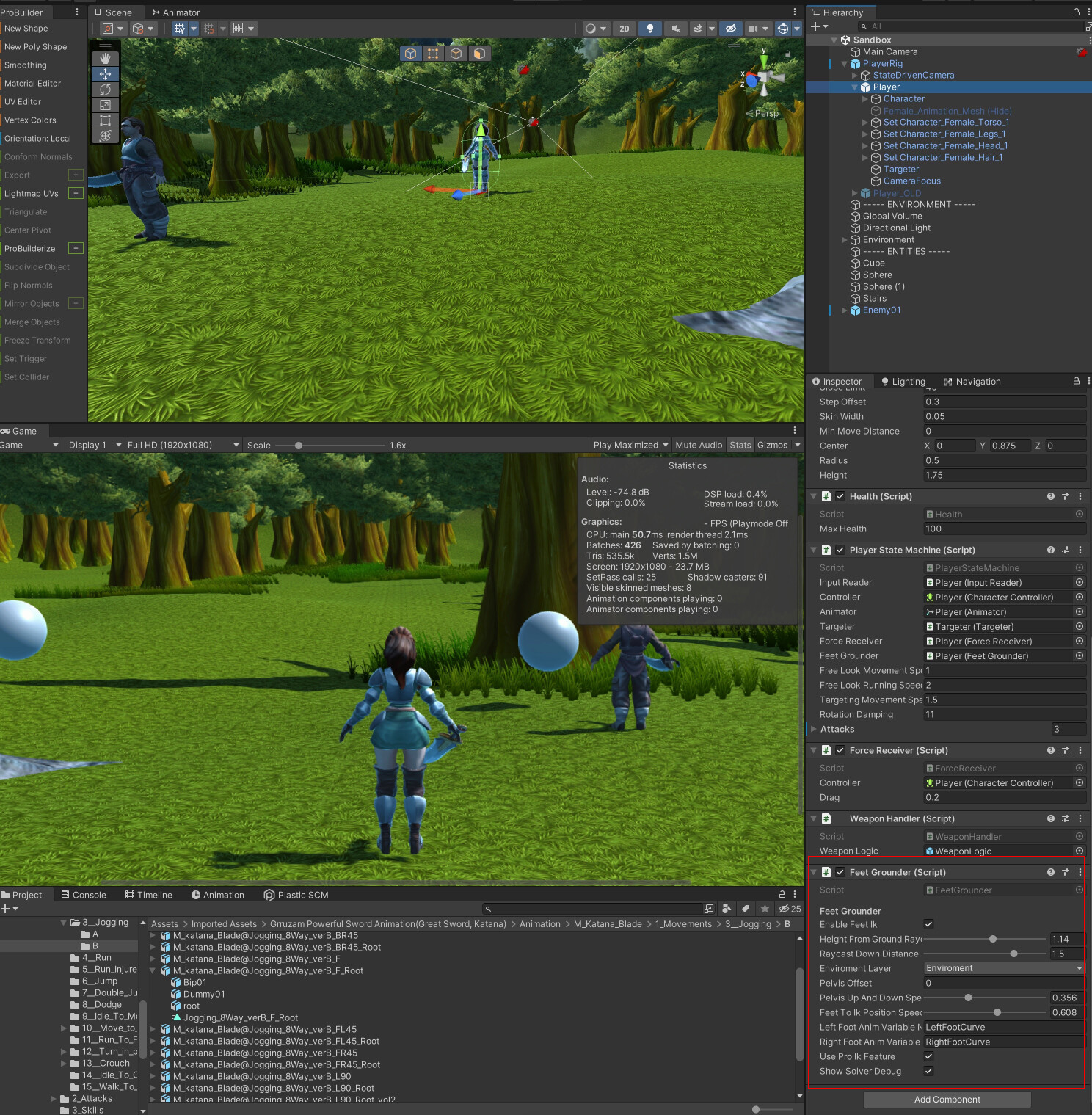
Here is how I’ve added a Foot IK system to my character. All you need to do is add the Script to your player to work(On the same object the Animator is). If you want proper Foot Rotation while the animation is playing - you will need to create Animation Curves. The Animation curve will tell the animator when the foot is on the ground in that particular animation. The curve will have a value of 1 if it’s on the ground and 0 if it’s in the air. This is optional and can be disabled/enabled from “Use Pro Ik Feature” toggle. Here is how the setup looks.
The script is based on this tutorial - https://youtu.be/MonxKdgxi2w + a fix from me for incorrect foot rotation in animations that have some offset (feet point to the sides / not forward )
ATTENTION - For any sort of action that requires the feet off the ground (ex: Jump/climb/etc) you should disable this script while performing that action

Here is the FeetGrounder.cs script
using System;
using System.Collections;
using System.Collections.Generic;
using UnityEngine;
public class FeetGrounder : MonoBehaviour
{
//Ik Feel Position and Rotation Values
private Vector3 _rightFootPosition, _leftFootPosition, _leftFootIkPosition, _rightFootIkPosition;
private Quaternion _leftFootIkRotation,
_rightFootIkRotation,
_currentLeftFootIkRotation,
_currentRightFootIkRotation;
private float _lastPelvisPositionY, _lastRightFootPositionY, _lastLeftFootPositionY;
private Animator _animator;
private Transform _leftFootTransform, _rightFootTransform;
[Header("Feet Grounder")]
public bool enableFeetIk = true;
[Range(0, 2)] [SerializeField] private float heightFromGroundRaycast = 1.14f;
[Range(0, 2)] [SerializeField] private float raycastDownDistance = 1.5f;
[SerializeField] private LayerMask enviromentLayer;
[SerializeField] private float pelvisOffset = 0f;
[Range(0, 1)] [SerializeField] private float pelvisUpAndDownSpeed = 0.28f;
[Range(0, 1)] public float feetToIkPositionSpeed = 0.5f;
public string leftFootAnimVariableName = "LeftFootCurve";
public string rightFootAnimVariableName = "RightFootCurve";
public bool useProIkFeature = false;
public bool showSolverDebug = true;
private void Start()
{
_animator = GetComponent<Animator>();
}
private void FixedUpdate()
{
if (enableFeetIk == false) {return;}
if (_animator == null) {return;}
AdjustFeetTarget(ref _rightFootPosition, HumanBodyBones.RightFoot);
AdjustFeetTarget(ref _leftFootPosition, HumanBodyBones.LeftFoot);
//find and raycast to the ground to find positions
FeetPositionSolver(_rightFootPosition,ref _rightFootIkPosition,ref _rightFootIkRotation);// handle the solver for right foot
FeetPositionSolver(_leftFootPosition, ref _leftFootIkPosition,ref _leftFootIkRotation);//Left foot Solver
}
private void OnAnimatorIK(int layerIndex)
{
if (enableFeetIk ==false) {return;}
if (_animator == null) {return;}
_currentLeftFootIkRotation = _animator.GetIKRotation(AvatarIKGoal.LeftFoot);
_currentRightFootIkRotation = _animator.GetIKRotation(AvatarIKGoal.RightFoot);
MovePelvisHeight();
//right foot Ik position and rotation -- utilise the pro feature here
_animator.SetIKPositionWeight(AvatarIKGoal.RightFoot,1);
if (useProIkFeature)
{
_animator.SetIKRotationWeight(AvatarIKGoal.RightFoot,_animator.GetFloat(rightFootAnimVariableName));
}
MoveFeetToIkPoint(AvatarIKGoal.RightFoot,_rightFootIkPosition,_rightFootIkRotation,ref _lastRightFootPositionY,_currentRightFootIkRotation);
//Left foot Ik position and rotation -- utilise the pro feature here
_animator.SetIKPositionWeight(AvatarIKGoal.LeftFoot,1);
if (useProIkFeature)
{
_animator.SetIKRotationWeight(AvatarIKGoal.LeftFoot,_animator.GetFloat(leftFootAnimVariableName));
}
MoveFeetToIkPoint(AvatarIKGoal.LeftFoot,_leftFootIkPosition,_leftFootIkRotation,ref _lastLeftFootPositionY,_currentLeftFootIkRotation);
}
private void MoveFeetToIkPoint(AvatarIKGoal foot, Vector3 positionIkHolder, Quaternion rotationIkHolder,
ref float lastFootPositionY,Quaternion currRot)
{
Vector3 targetIkPosition = _animator.GetIKPosition(foot);
Quaternion nextRot = rotationIkHolder * currRot;
if (positionIkHolder != Vector3.zero)
{
targetIkPosition = transform.InverseTransformPoint(targetIkPosition);
positionIkHolder = transform.InverseTransformPoint(positionIkHolder);
float yVariable = Mathf.Lerp(lastFootPositionY, positionIkHolder.y, feetToIkPositionSpeed);
targetIkPosition.y += yVariable;
lastFootPositionY = yVariable;
targetIkPosition = transform.TransformPoint(targetIkPosition);
_animator.SetIKRotation(foot, nextRot);
}
_animator.SetIKPosition(foot,targetIkPosition);
}
private void MovePelvisHeight()
{
if (_rightFootIkPosition == Vector3.zero || _leftFootIkPosition == Vector3.zero ||
_lastPelvisPositionY == 0)
{
_lastPelvisPositionY = _animator.bodyPosition.y;
return;
}
float lOffsetPosition = _leftFootIkPosition.y - transform.position.y;
float rOffsetPosition = _rightFootIkPosition.y - transform.position.y;
float totalOffset = (lOffsetPosition < rOffsetPosition) ? lOffsetPosition : rOffsetPosition;
Vector3 newPelvisPosition = _animator.bodyPosition + Vector3.up * totalOffset;
newPelvisPosition.y = Mathf.Lerp(_lastPelvisPositionY, newPelvisPosition.y, pelvisUpAndDownSpeed);
_animator.bodyPosition = newPelvisPosition;
_lastPelvisPositionY = _animator.bodyPosition.y;
}
private void FeetPositionSolver(Vector3 fromSkyPosition, ref Vector3 feetIkPositions, ref Quaternion feetIkRotations)
{
//raycast section - locating the feet position via a raycast and solving
RaycastHit feetOutHit;
if (showSolverDebug)
{
Debug.DrawLine(fromSkyPosition,fromSkyPosition + Vector3.down *
(raycastDownDistance + heightFromGroundRaycast),Color.yellow);
}
if (Physics.Raycast(fromSkyPosition, Vector3.down,
out feetOutHit, raycastDownDistance + heightFromGroundRaycast, enviromentLayer))
{
float rotationStiffnessSlerpValue = Time.deltaTime * 8f;
feetIkPositions = fromSkyPosition;
feetIkPositions.y = feetOutHit.point.y + pelvisOffset;
Quaternion feetHitRot = Quaternion.FromToRotation(Vector3.up, feetOutHit.normal);
feetIkRotations = Quaternion.Slerp(feetIkRotations, feetHitRot,rotationStiffnessSlerpValue);
Debug.DrawLine(feetIkPositions,feetOutHit.normal * (raycastDownDistance + heightFromGroundRaycast),Color.magenta);
return;;
}
feetIkPositions = Vector3.zero;//it didnt work
}
private void AdjustFeetTarget(ref Vector3 feetPositions, HumanBodyBones foot)
{
feetPositions = _animator.GetBoneTransform(foot).position;
feetPositions.y = transform.position.y + heightFromGroundRaycast;
}
}
