Hey everyone, so I just wanted to point out that I think manually adding gimbals is more of a work around to what we really want to achieve in this case rather than a solution.
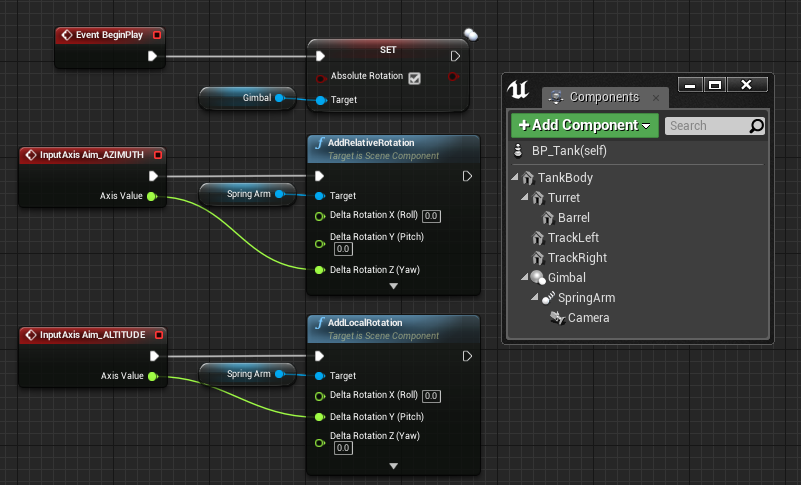
There is no doubt that gimbals are useful in many cases, but here what we really want to achieve is a relative rotation of the camera via the spring arm with respect to the tank body. So why not use a relative rotation with respect to the tank body ? e.g. AddRelativeRotation (spring_arm).
Using this method simplifies the BP and logic. It also got rid of the snapping effect. I am still in lecture 119, so maybe I am missing something.
I have tried this method and it works well. There is only one exception though if you try to pitch more than 180, or -180, I think there are limits on the pitch compared to the yaw which is not clamped. Can anyone shed some light on this ? when hitting this boundary I think the rotations have troubles.
Cheers !