
Share here the NavMeshAgent parameters that allowed Ethan to run most realistically. If possible include a video of the running.
I actually think that in my case, I don’t know if it’s the shape of the obstacle, but I didn’t really have to tweak that much from what you showed us.
Here is Ethan running from two different points of view:
1 Like
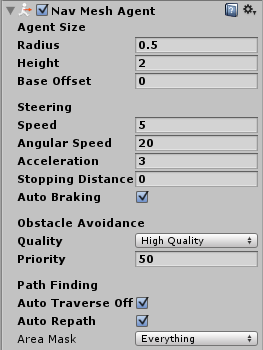
I have Speed at 4.5, Angular Speed at 20, and Acceleration at 3. I also found that the agent should be place far away from the obstacle at the start.
I decided to make Ethan a little maze. As a result his speed had to be right down at 2 and angular speed at 10, otherwise he kept trying to clip the corners.