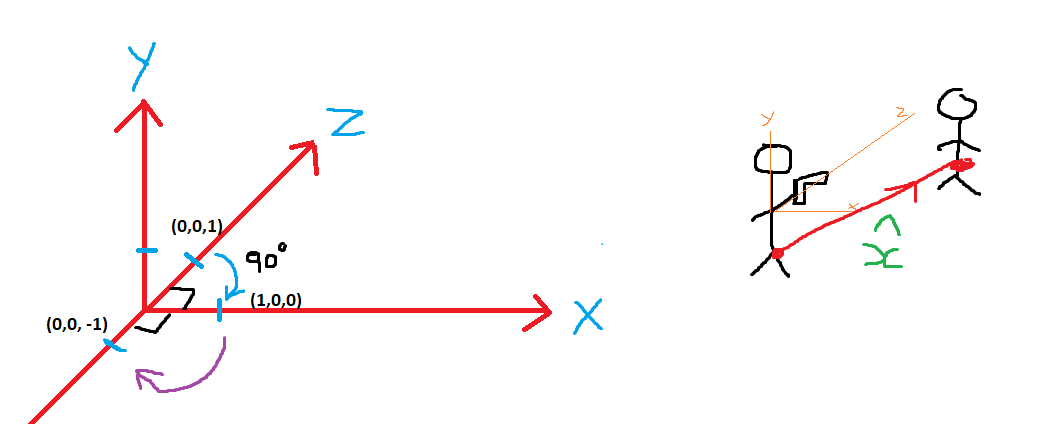
Trying to understand the maths being done here to position the camera to the unit’s right shoulder.
How does Quaternion.Euler(0, 90f, 0) * shootDir * shoulderOffsetAmount actually offset the shoulder amount distance ? I’m mostly confused because i normally use Quaternion.Euler(0, 90f, 0) to set rotations of my objects.