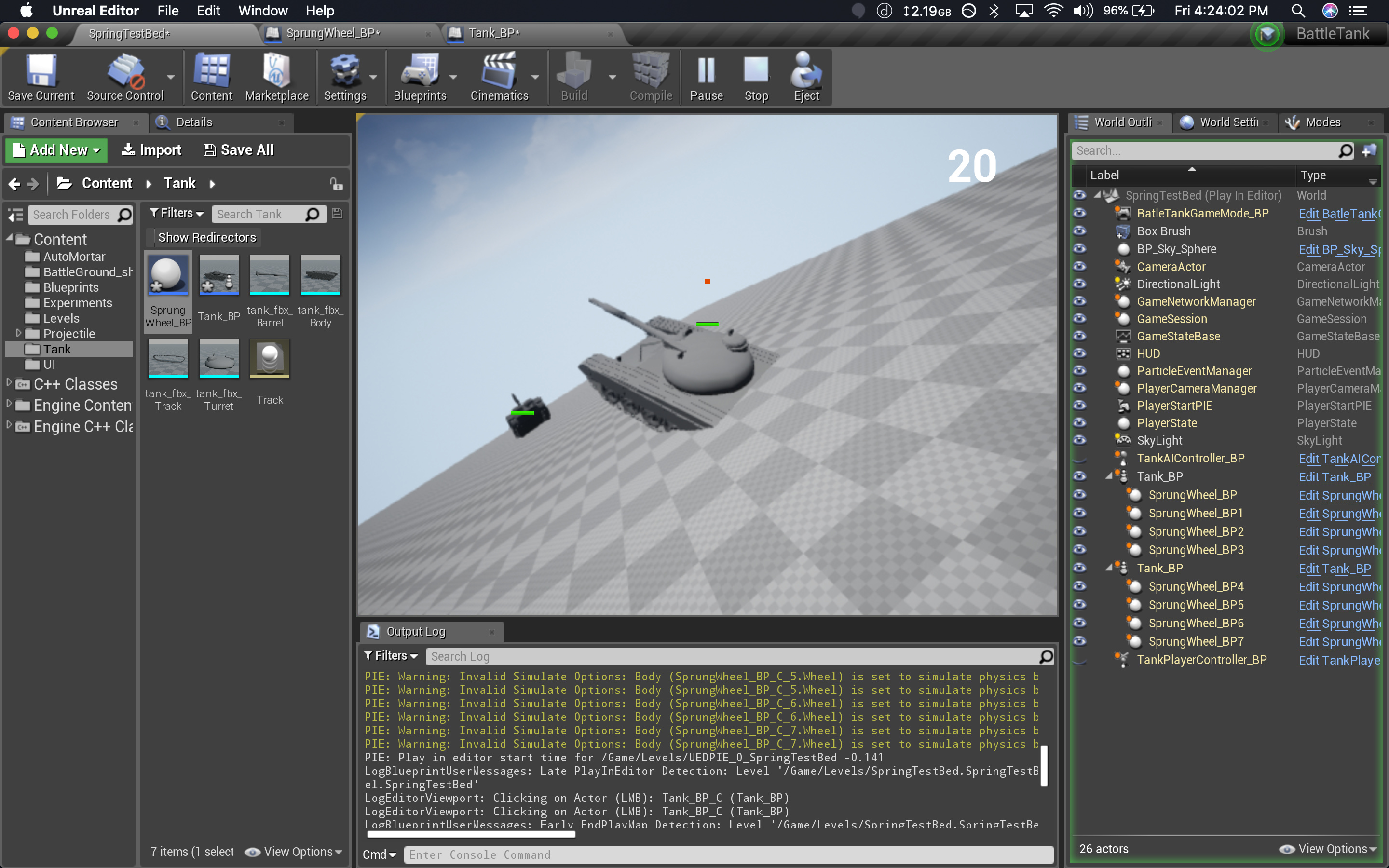
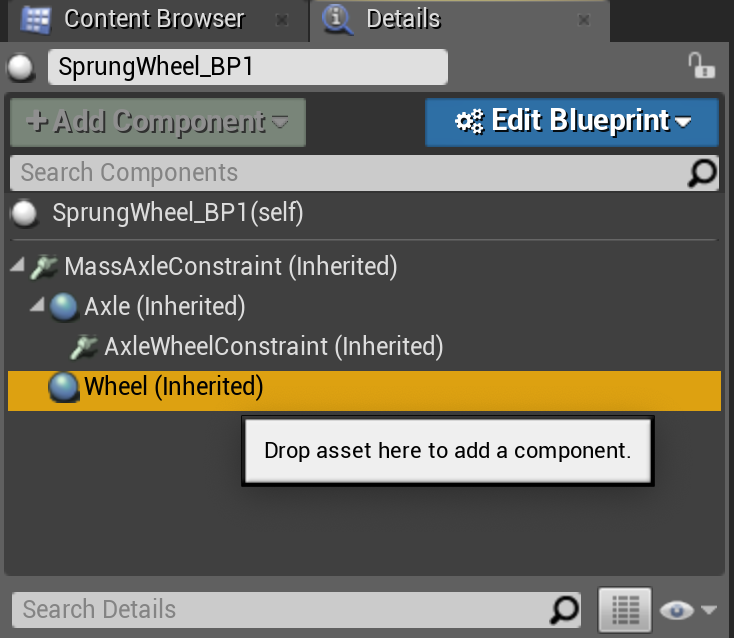
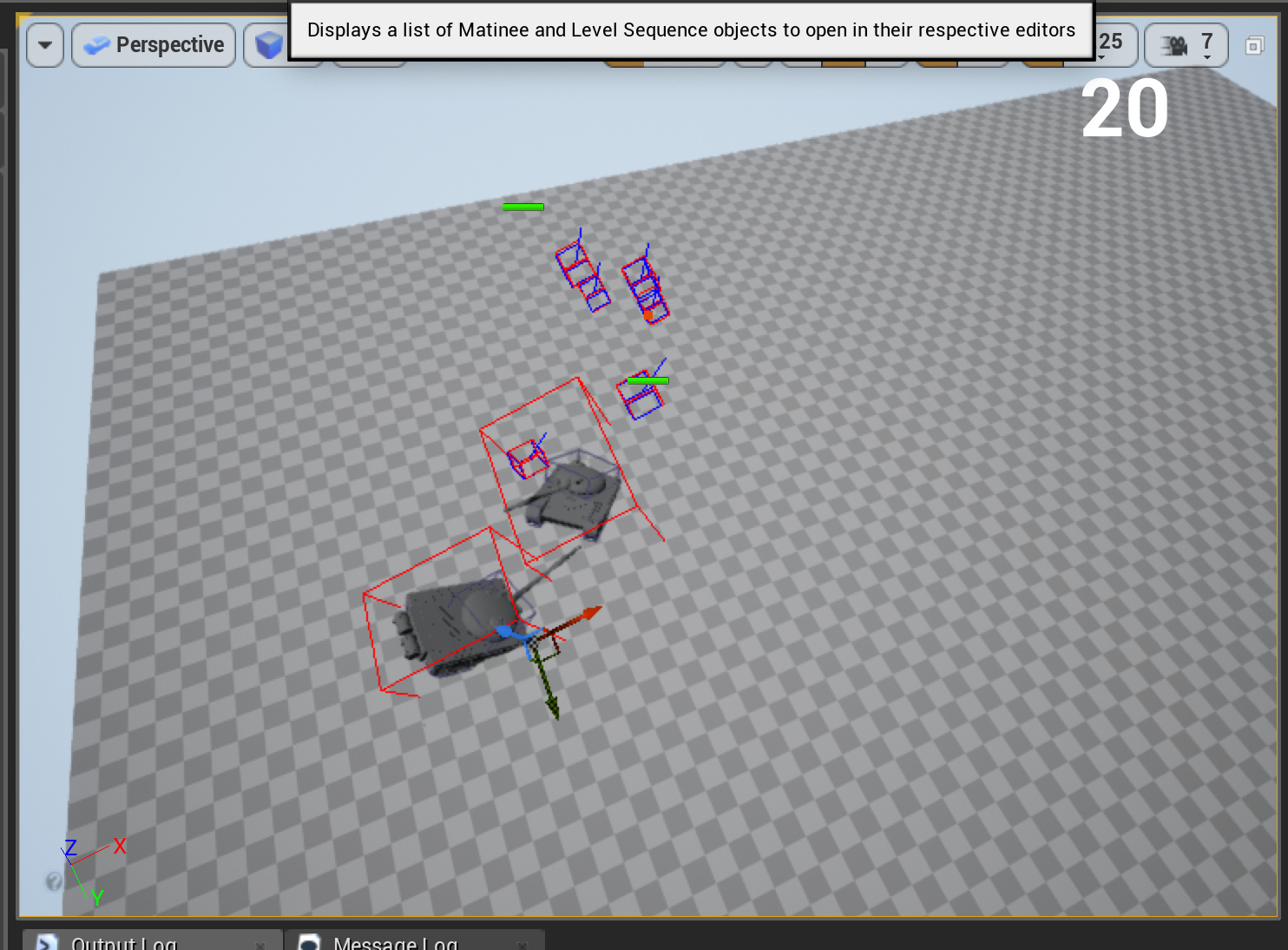
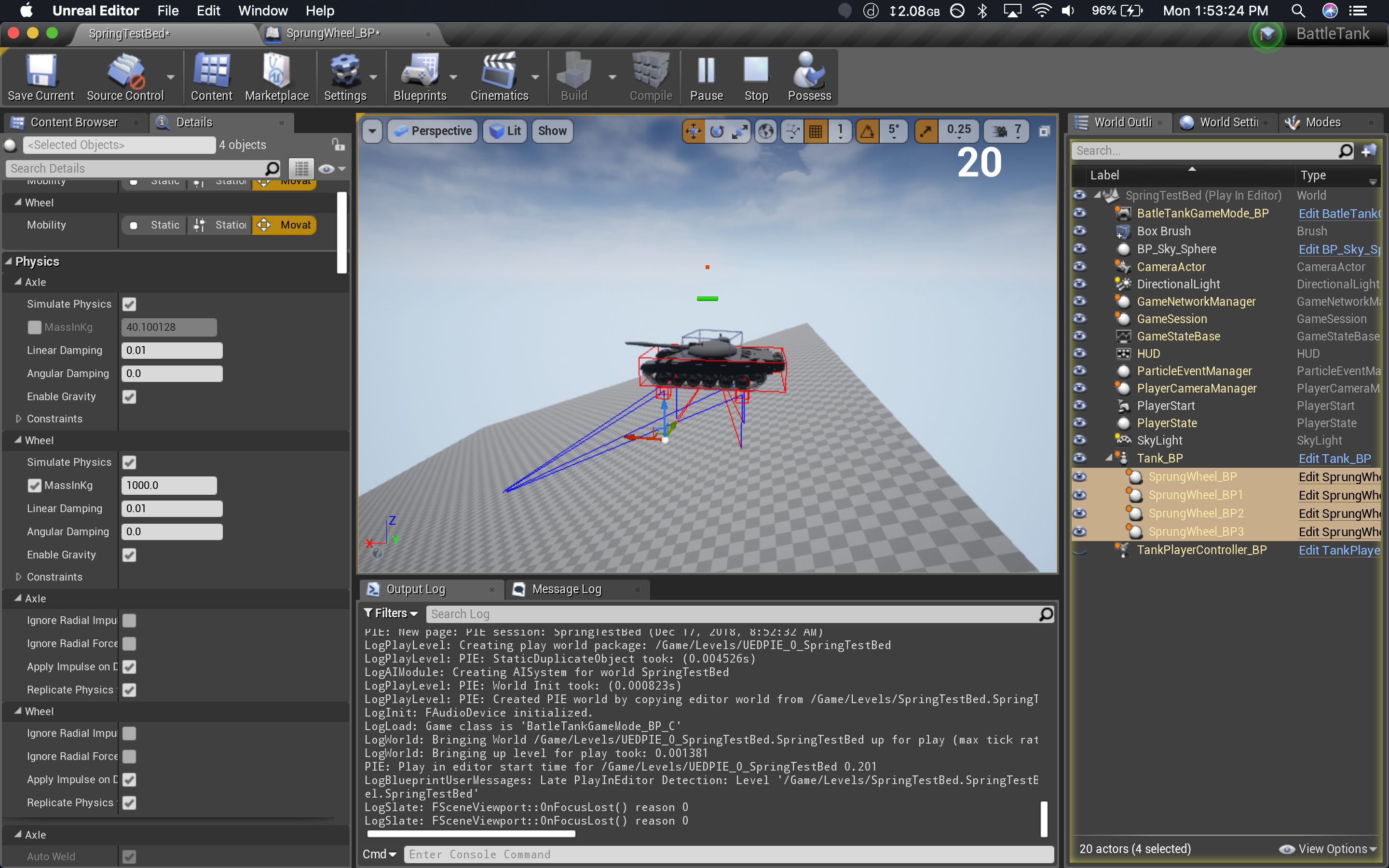
Help I’ve tried setting the left and right track to OverlapAllDynamic and the ends of the tank are falling through the cube that is the floor. I’m also receiving a warning. Obviously, the wheels are not collecting correctly, but I can’t figure out where I went wrong. I renamed the MassWheelConstraint to MassAxelConstraint, is there other stuff that needs to be changed when doing that? Also, as I understand the wheel and the axel both need simulate physics right?
PIE: Warning: Invalid Simulate Options: Body (SprungWheel_BP_C_0.Wheel) is set to simulate physics but Collision Enabled is incompatible
PIE: Warning: Invalid Simulate Options: Body (SprungWheel_BP_C_0.Wheel) is set to simulate physics but Collision Enabled is incompatible
PIE: Warning: Invalid Simulate Options: Body (SprungWheel_BP_C_1.Wheel) is set to simulate physics but Collision Enabled is incompatible
PIE: Warning: Invalid Simulate Options: Body (SprungWheel_BP_C_1.Wheel) is set to simulate physics but Collision Enabled is incompatible
PIE: Warning: Invalid Simulate Options: Body (SprungWheel_BP_C_2.Wheel) is set to simulate physics but Collision Enabled is incompatible
PIE: Warning: Invalid Simulate Options: Body (SprungWheel_BP_C_2.Wheel) is set to simulate physics but Collision Enabled is incompatible
PIE: Warning: Invalid Simulate Options: Body (SprungWheel_BP_C_3.Wheel) is set to simulate physics but Collision Enabled is incompatible
PIE: Warning: Invalid Simulate Options: Body (SprungWheel_BP_C_3.Wheel) is set to simulate physics but Collision Enabled is incompatible
PIE: Warning: Invalid Simulate Options: Body (SprungWheel_BP_C_4.Wheel) is set to simulate physics but Collision Enabled is incompatible
PIE: Warning: Invalid Simulate Options: Body (SprungWheel_BP_C_4.Wheel) is set to simulate physics but Collision Enabled is incompatible
PIE: Warning: Invalid Simulate Options: Body (SprungWheel_BP_C_5.Wheel) is set to simulate physics but Collision Enabled is incompatible
PIE: Warning: Invalid Simulate Options: Body (SprungWheel_BP_C_5.Wheel) is set to simulate physics but Collision Enabled is incompatible
PIE: Warning: Invalid Simulate Options: Body (SprungWheel_BP_C_6.Wheel) is set to simulate physics but Collision Enabled is incompatible
PIE: Warning: Invalid Simulate Options: Body (SprungWheel_BP_C_6.Wheel) is set to simulate physics but Collision Enabled is incompatible
PIE: Warning: Invalid Simulate Options: Body (SprungWheel_BP_C_7.Wheel) is set to simulate physics but Collision Enabled is incompatible
PIE: Warning: Invalid Simulate Options: Body (SprungWheel_BP_C_7.Wheel) is set to simulate physics but Collision Enabled is incompatible
Forgot to mention I am using 4.21.1.
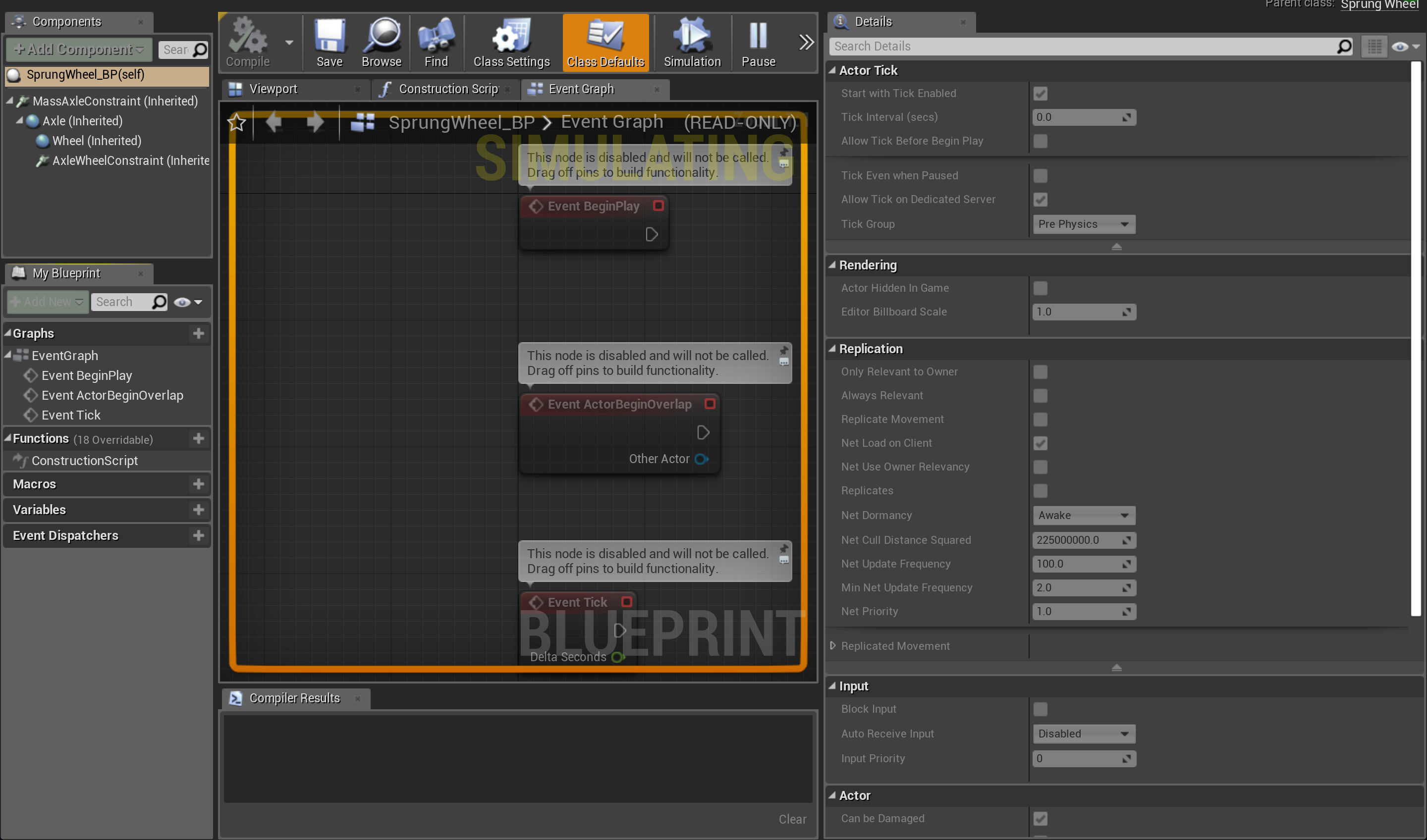
I had to recreate the blueprint for the SprungWheel_BP and I may have forgotten a field.
Also no matter what I try the USphereComponent doesn’t show up as those red spheres.