@ben @sampattuzzi
Hey guys!
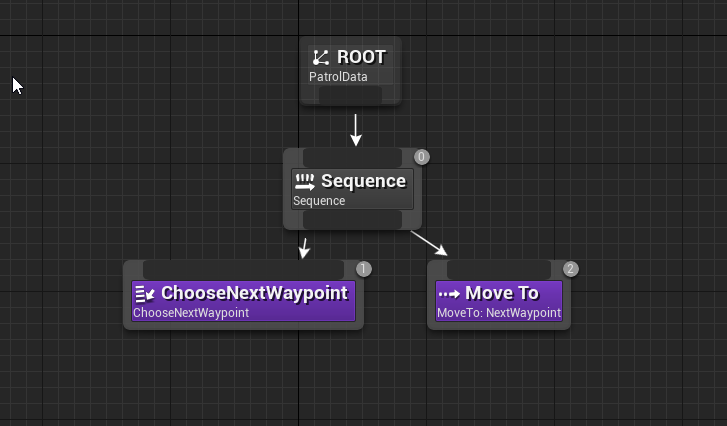
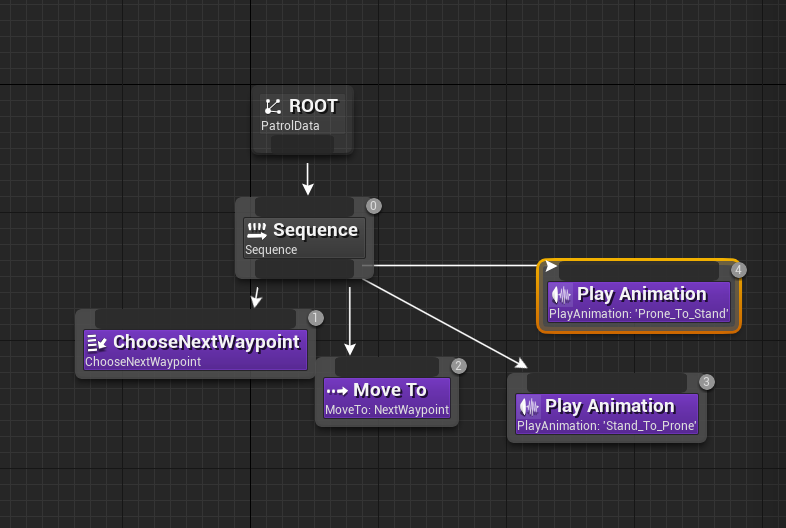
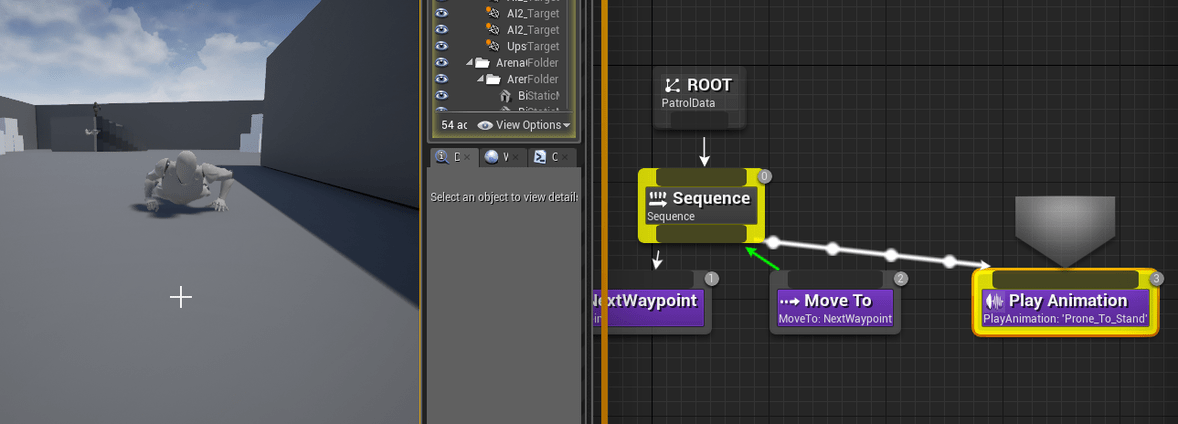
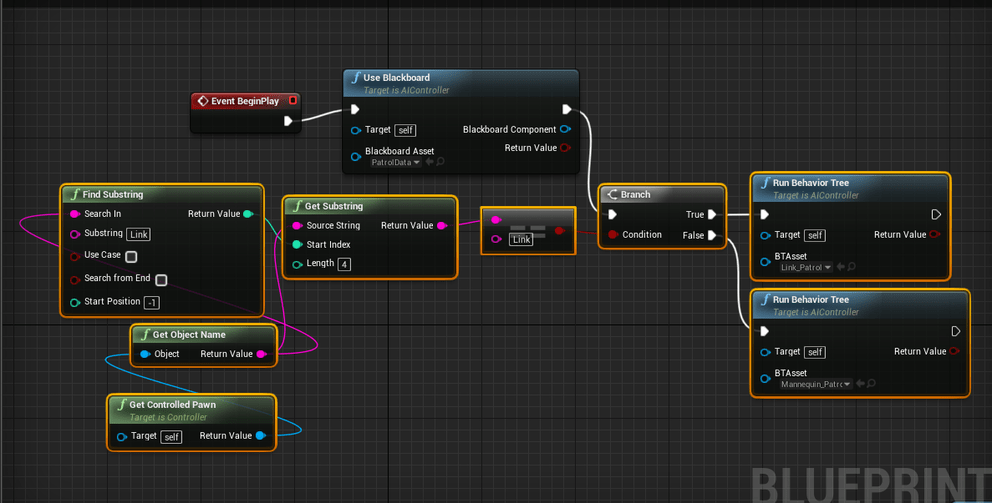
I’m really loving the course so far! Right now I am having an issue with Choose next waypoint. I got to the Sub Behavior Trees lecture and realized my guys have an issue when patrolling. This issue has actually been happening for me since we first started using choose next waypoint it just never caused a problem till this lecture. When patrolling, once they reach their target, they wait on their own for a few seconds even though I haven’t given the command before cycling to the next target. Well the real problem is that it isn’t allowing me to execute any animations they just keep patrolling. When I check on the black board data it isn’t showing that the waypoint indexes are being cycled. However if I break the link to choose next waypoint in the behavior tree they wont move. I put a print string in the choose next waypoint blueprint, one for initiated and one for succeeded, neither are being triggered. What is funny is I downloaded your repo and checked out to the same lecture copy and the issue with waiting is fixed but what is interesting is that I put the same print commands in that version of choose next waypoint as I did in mine and it still isn’t reporting that it is being initiated. I am curious as to what I did different in my version to cause the self waiting issue and why in niether my version or yours that the choose next waypoint blueprint isn’t reporting any activity when print commands are put in the execution flow. Here is a link to my github repo:
Thank you so much.