
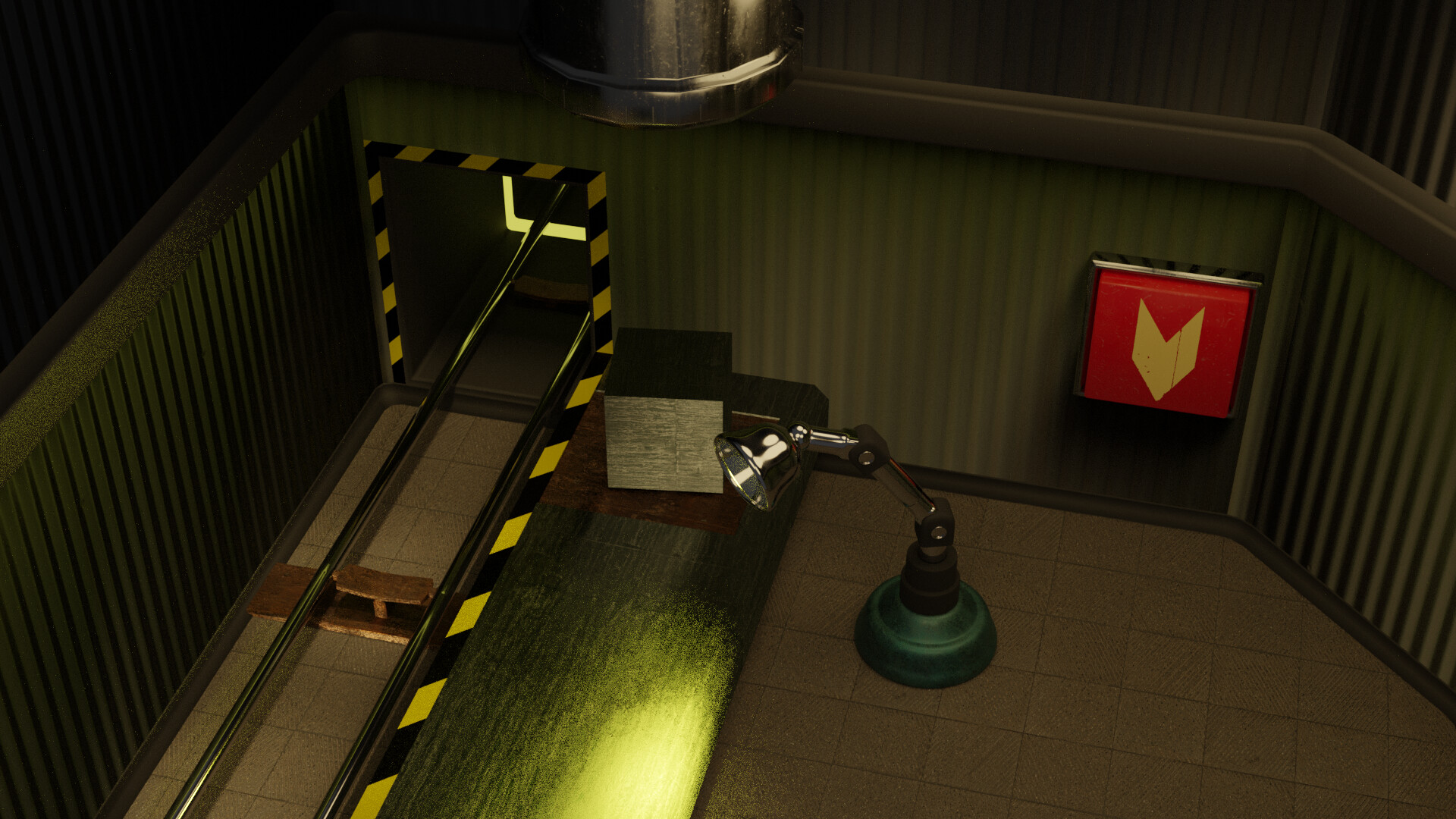
I skipped a few discussion posts because I kind of just went ahead and modeled/rigged the whole lamp like 5-6 lectures ago as I was already familiar with the various modifiers the course needed to cover. So here’s my completed lamp in a render!
And here is the lamp in the editor:

It’s not anywhere near the lamp that the course is creating and as such I feel I should explain my rigging. From bottom to top:
Base (root bone): no movement will be implemented and no restraints.
Stem: child of Base but not actually attached. Has a location restraint on the local Z for vertical telescoping and a rotation constraint on X and Y so it can only rotate on Z (horizontally)
ArmBase: First swivel joint. Is attached to the Stem bone and has a limit rotation on local Z of 0 to 85 degrees.
ArmExtend: Same concept as Stem, a telescoping section with the same location constraint but with a full rotation constraint.
Neck: Second swivel joint. Same concept as ArmBase.
Head: Full ball joint with constraints of -75 to 75 degrees on each local axis.
This way I can have complete control over the size and position of the entire lamp as it needs to articulate in multiple directions to shove the cube and turn and push the button.
