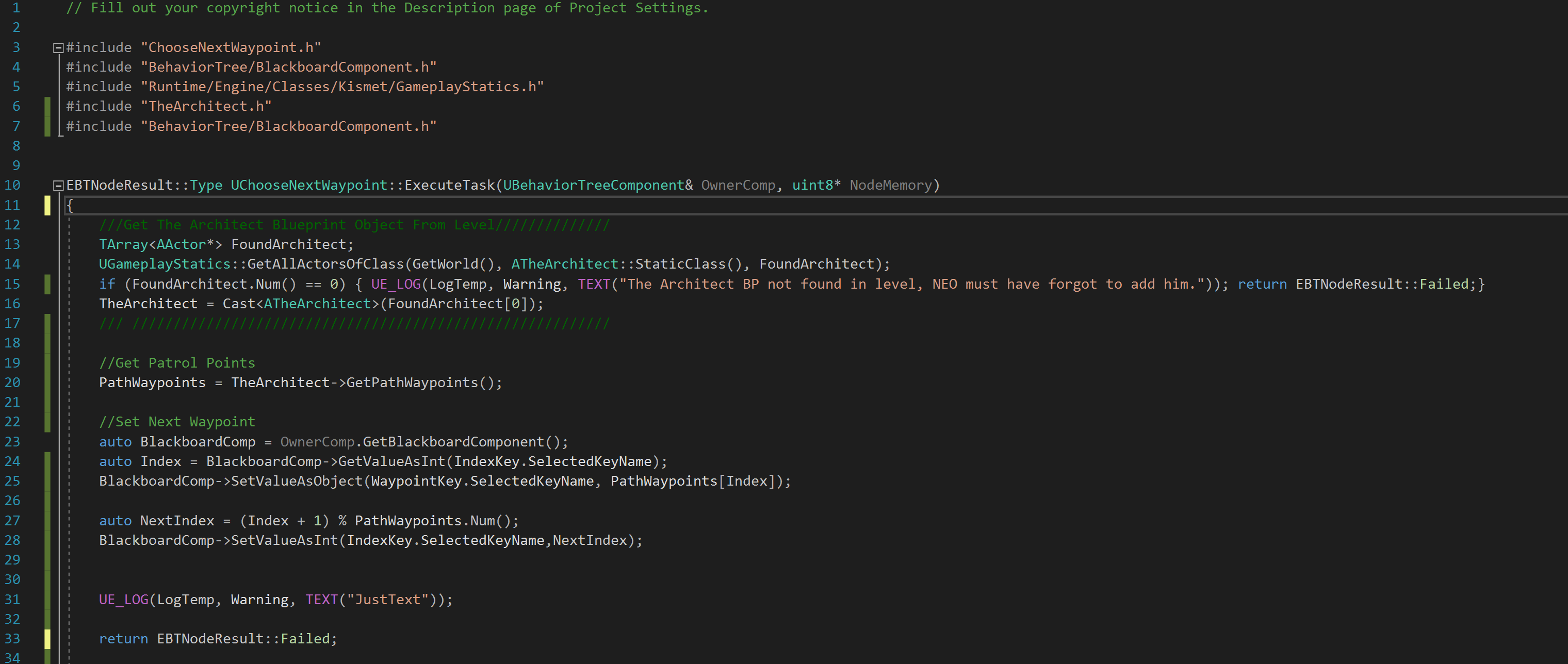
Hello, This lecture seems very straight forward, however It only works when I set return EBTNodeResult::Failed; The same also applies for the blueprint version we converted to C++. It only worked if I left “success” unchecked.
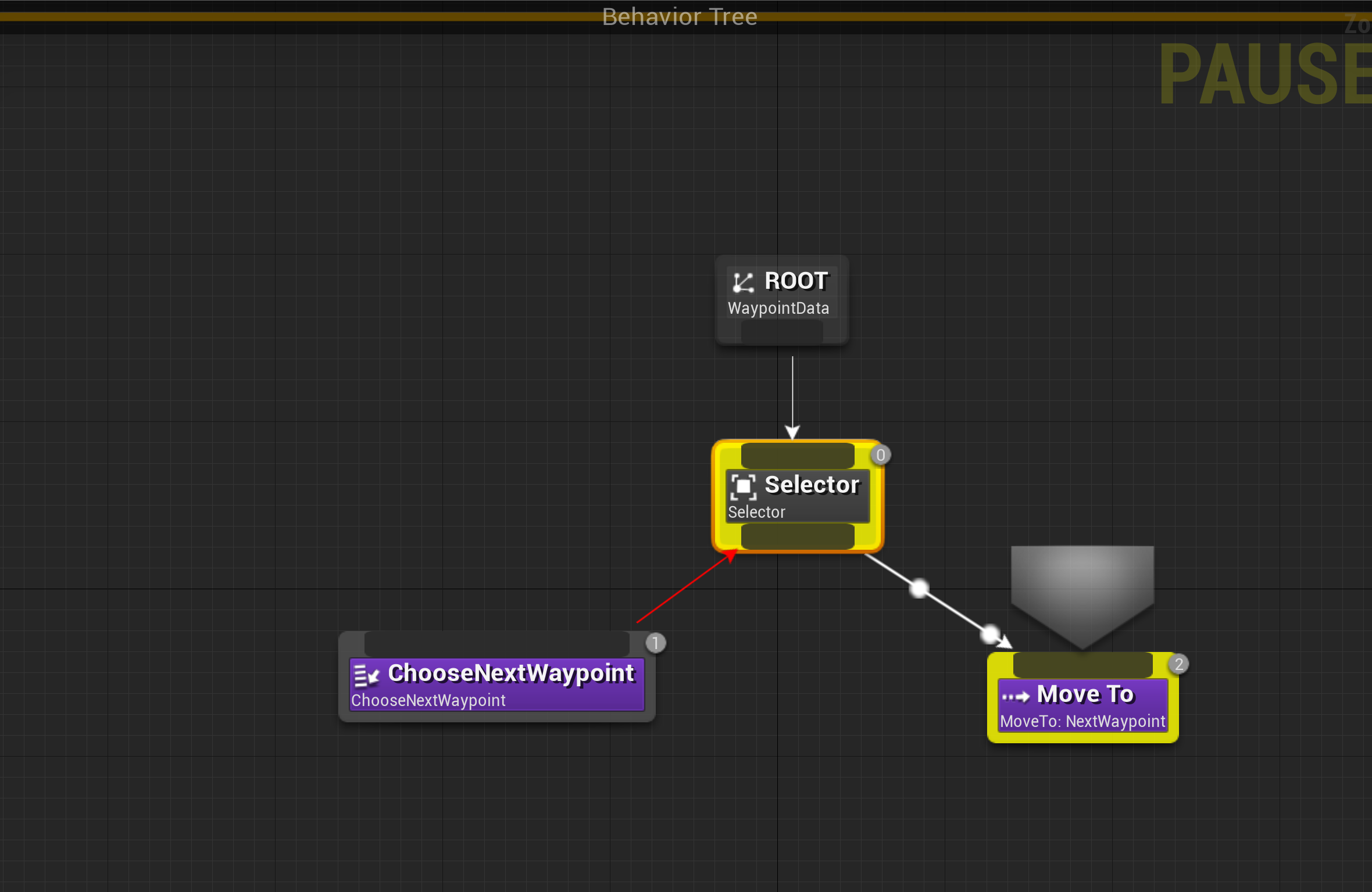
If I leave it “Success”, in the behavior tree, it just gets stuck going from root, then to selector, then to choose next way-point and back again… but if I set the result to failed. It will execute the loop properly and the 3rd person character will patrol. The only real difference is that my patrol is on a level object called the architect. Its function is similar to a singleton. It just stores various level variables. Does anyone have any idea why this is?