GameDev.tv
Be the first to post for 'Sub Behaviour Trees'!
Unreal Courses
Talk
unreal-cpp
,
30_tg_urc
Marc_Carlyon
October 13, 2016, 1:52pm
2
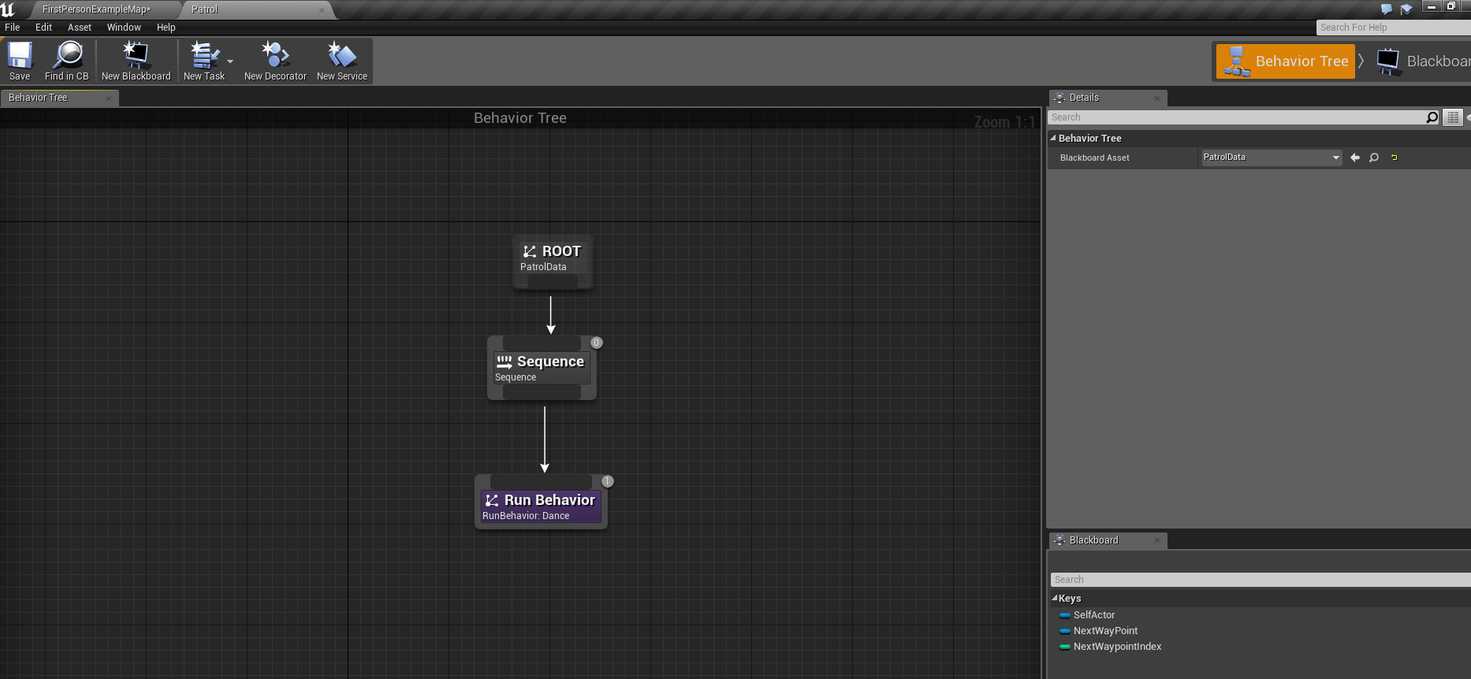
1471×679 82 KB
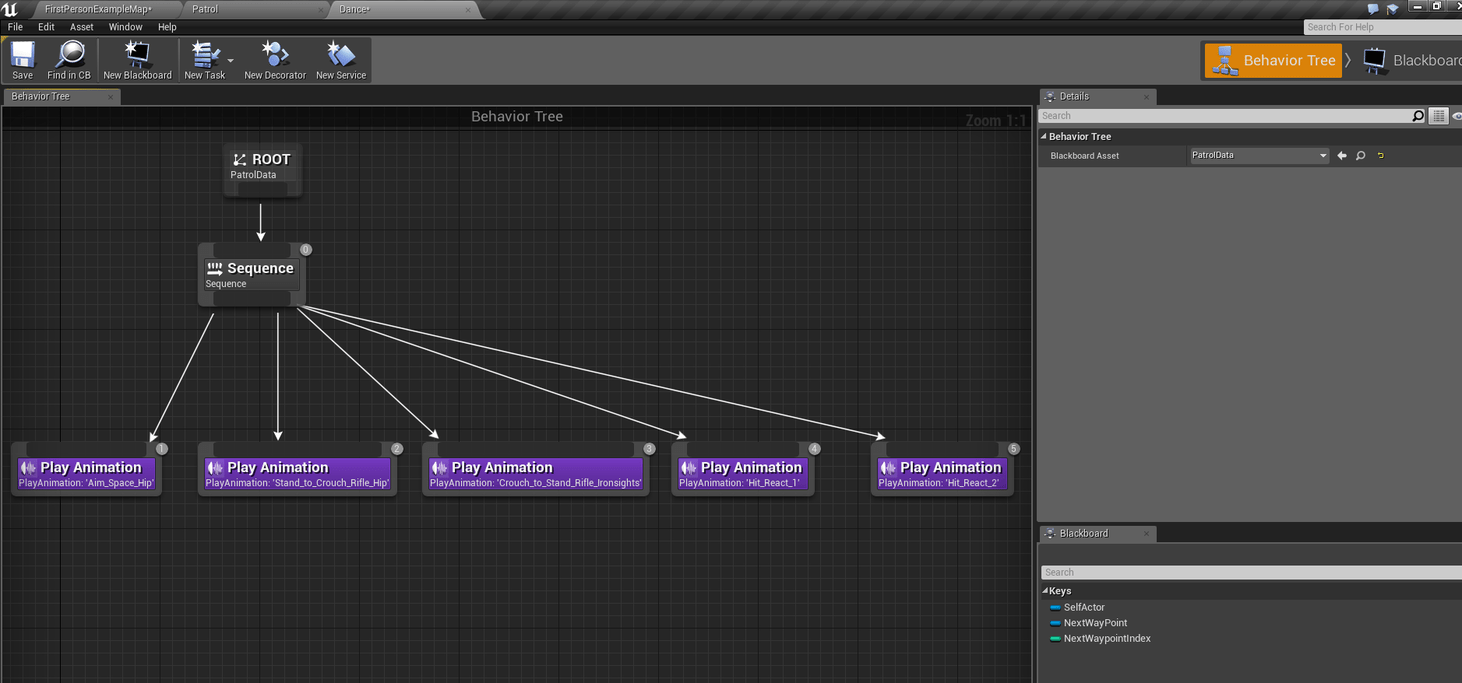
1462×683 101 KB
And you said have some fun right
@ben
?
https://community.gamedev.tv/uploads/short-url/5Hhm0RIUzCKOhX3ekEElqM62tXK.mp4
4 Likes
@System edited a lot of my post in the forum
show post in topic